Projects
Robotics, computer vision, controls and more — built with Python, C++, ROS and MATLAB.
Robot Path Planning
6 Projects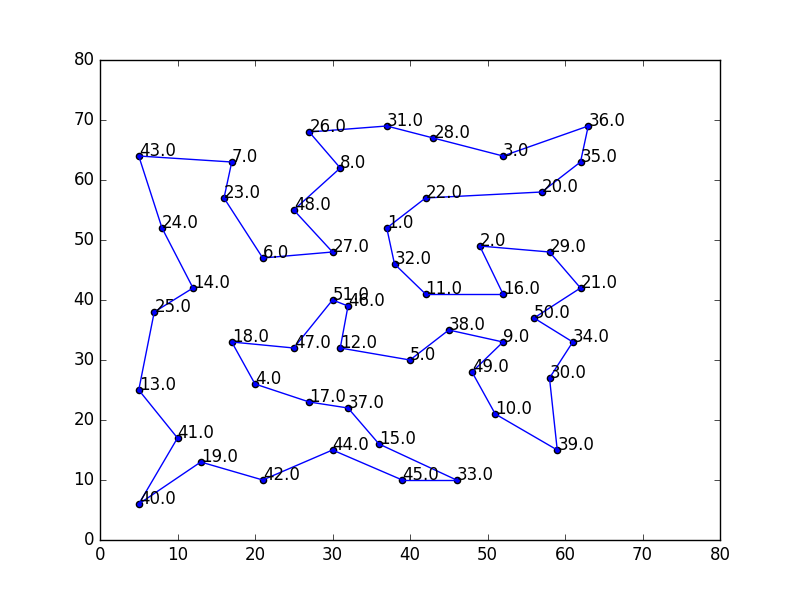
Implemented a 2-approximation TSP solver using Minimum Spanning Tree + DFS, then refined with 2-opt and nearest-neighbour heuristics to minimize total tour cost.
▶ Video Link
Implemented Dijkstra and A* with differential constraints on a TurtleBot. Generated wheel RPMs alongside the path and visualised real traversal in VRep.
GitHub
BFS-based puzzle solver that explores all reachable configurations until the goal state is reached, with custom input support and two complexity modes.
GitHub
Used the Prometheus frontier exploration package in ROS to autonomously explore unknown environments. Developed with TDD across three one-week sprints.
GitHub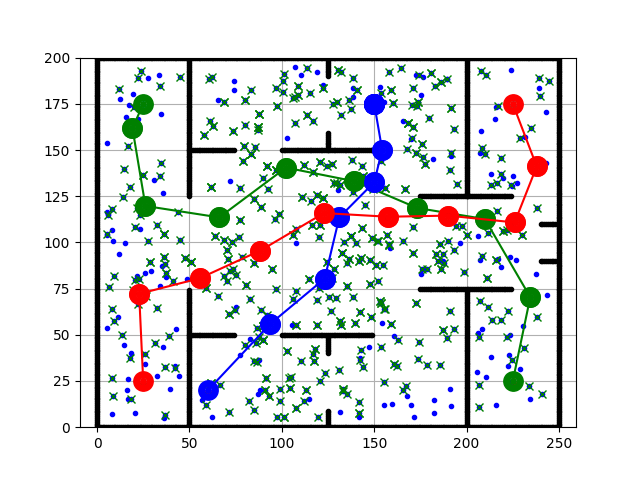
PRM algorithm generates a roadmap for the static scene, then A* plans a time-optimal trajectory that avoids dynamic obstacles with known constant velocities.
GitHub
Classic Dijkstra and A* implementations on a static map with configurable start/goal, comparing optimality and runtime between the two approaches.
GitHubOptimal Controls
1 Project
Design and simulation of a Linear Quadratic Regulator (LQR) controller for a double-pendulum gantry crane system to achieve stable, energy-optimal control.
GitHubRobot Modelling
1 Project
Full design cycle of an articulated fruit-picking robot: link-length design, forward & inverse kinematics derivation, and MATLAB simulation of the complete system.
GitHubComputer Vision
5 Projects
Perspective transform + histogram-based lane pixel detection with polynomial fitting for turn prediction. Runs on front-facing camera footage.
GitHub
Underwater buoy segmentation using Gaussian Mixture Models + Expectation-Maximization for robust colour thresholding under dynamic lighting. Detection via Hough Circles.
GitHub
MSER-based sign detection followed by HOG + SVM classification achieving 97.4% accuracy across 8 commonly-used traffic signs.
GitHub
Custom AR tag detection via edge/corner detection, perspective transform for ID recognition, and virtual cube superimposition using a computed projection matrix.
GitHub
Differential tracker that warps frames to align with a first-frame template. Enhanced with LAB color space and histogram equalization for illumination invariance.
GitHub